

About AEIAdvances in Engineering Innovation (AEI) is an open-access, peer-reviewed monthly journal hosted by Tianjin University Research Centre on Data Intelligence and Cloud-Edge-Client Service Engineering and published by EWA Publishing. Covering computer, electrical, mechanical, chemical environmental and civil engineering, AEI targets standardized engineering research with prominent scientific discovery value, mature technical iteration value and on-site engineering practice value, additionally highlighting ecological environmental protection and industrial digital empowerment value of engineering technologies, and offers replicable experimental standards and industrial transformation schemes to university engineering researchers, enterprise R&D engineers and environmental technical consultants to realize multi-scenario engineering practice value.For the details about the AEI scope, please refer to the Aims and Scope page. For more information about the journal, please refer to the FAQ page or contact info@ewapublishing.org. |
| Aims & scope of AEI are: · Computer Science · Electrical & Electronic Engineering · Mechanical Engineering & Automation · Chemical & Environmental Engineering · Civil Engineering |
Article processing charge
A one-time Article Processing Charge (APC) of 450 USD (US Dollars) applies to papers accepted after peer review. excluding taxes.
Open access policy
This is an open access journal which means that all content is freely available without charge to the user or his/her institution. (CC BY 4.0 license).
Your rights
These licenses afford authors copyright while enabling the public to reuse and adapt the content.
Peer-review process
Our blind and multi-reviewer process ensures that all articles are rigorously evaluated based on their intellectual merit and contribution to the field.
Editors View full editorial board

Chicago, USA
momar3@iit.edu

Tianjin, China
rgz@tju.edu.cn

Tianjin, China
zhangli2006@tust.edu.cn

Boston, USA
rkpaul@bu.edu
Latest articles View all articles
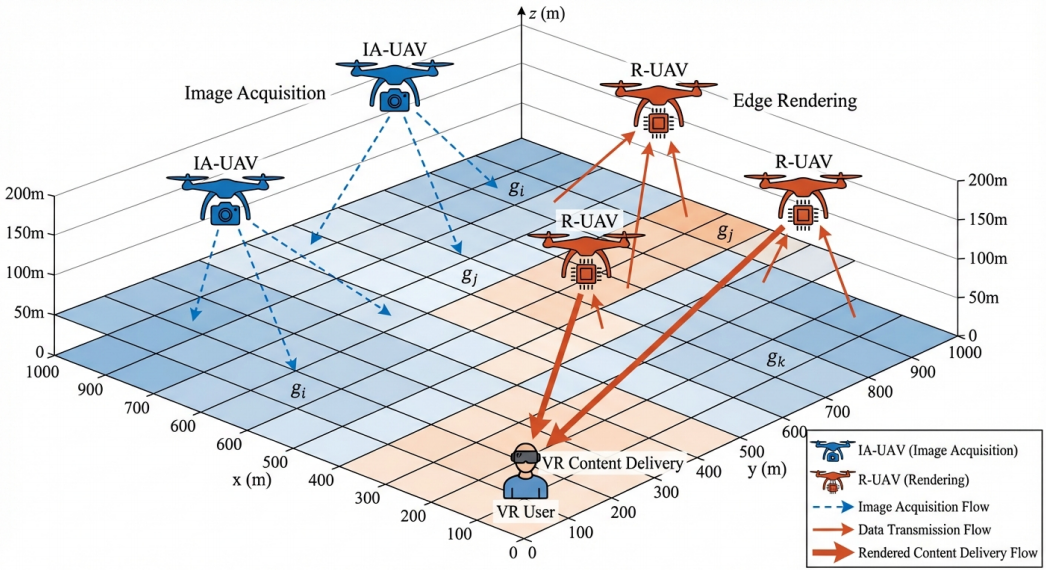
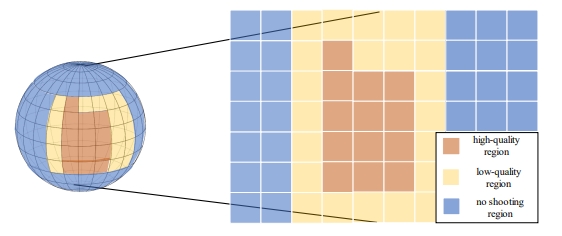
As the demand for low latency and high immersion in Virtual Reality (VR) applications continues to grow, traditional passive content update mechanisms based on Age of Information (AoI) struggle to meet real-time requirements in scenarios with rapid user perspective changes. To address this issue, this paper proposes a UAV-assisted adaptive VR content prefetching method based on user perspective prediction. First, under the UAV-assisted edge computing framework, a heterogeneous system model is constructed that integrates user perspective states, scene semantic information, and Age of Information. Second, a lightweight intention prediction module composed of a temporal perspective encoder and cross-modal attention mechanism is designed to achieve accurate prediction of future gaze region probability distributions; a graph attention mechanism is then employed to deeply aggregate the prediction results with multi-source state information, generating a prediction-aware enhanced state representation. On this basis, the enhanced state representation is embedded into a hierarchical reinforcement learning scheduling framework, enabling the transition from passive response to active prefetching. Experimental results demonstrate that the proposed method outperforms comparison methods in terms of weighted end-to-end latency, content timeliness, and system energy efficiency, validating the effectiveness and practicality of the approach.




Continual relation extraction aims to learn newly arriving relation types while preserving previously acquired knowledge, but it remains challenging due to catastrophic forgetting and severe confusion among semantically similar relations. To address this problem, we propose a continual relation extraction method that integrates prompt learning, feature enhancement, anchoring loss, and similarity-aware prototype contrastive learning. Specifically, relation-specific soft prompts and dynamic prompt selection are introduced to provide targeted semantic guidance for different samples. Based on the matched prompts, both relation prototypes and sample representations are further enhanced to improve feature quality and discriminability. In addition, an anchoring loss and a similarity-aware prototype contrastive objective are designed to explicitly optimize the boundaries between semantically similar relations during memory replay. Experiments on the FewRel and TACRED datasets show that the proposed method consistently outperforms representative baseline methods, especially in later task stages where continual learning becomes more challenging. Ablation studies and visualization results further verify the effectiveness of prompt-guided feature enhancement and similar-relation-aware optimization. These results indicate that explicitly strengthening fine-grained semantic boundaries, in addition to preserving historical knowledge, is important for continual relation extraction, and the proposed method provides an effective solution for improving both knowledge retention and relation discrimination.
Existing studies on multi-UAV inspection methods largely overlook path overlap avoidance among UAVs and differentiated quality control of inspection tasks. As a result, such systems are unable to ensure both cooperative efficiency and the inspection quality of critical areas in practical operations. To address these limitations, this paper proposes a framework that integrates a path overlap avoidance mechanism with a task importance grading strategy. The framework adopts a hybrid decision-making architecture combining centralized task allocation with distributed reinforcement learning control. Specifically, a central controller performs global task assignment based on overall task importance, real-time UAV status, and available bandwidth. Meanwhile, individual Unmanned Aerial Vehicles (UAVs) employ reinforcement learning to autonomously conduct local trajectory planning and imaging decisions. Through the path overlap avoidance mechanism, redundant inspection of the same area is effectively prevented, while bandwidth is dynamically requested or released according to task importance. Simulation results demonstrate that, compared with existing approaches, the proposed method improves inspection efficiency by approximately 24% and enhances overall inspection quality by 20%.

To address the issue of Quality of Service (QoS) degradation for mission-critical tasks in Low Earth Orbit (LEO) satellite edge computing under extreme congestion, this paper proposes an intelligent computation offloading architecture based on graph attention imitation learning. The proposed method models the satellite network as a time-varying graph to extract global topological features and innovatively introduces a QoS-aware action masking mechanism to forcibly preclude suboptimal decisions through strict physical constraints. Simulation results demonstrate that the proposed algorithm significantly reduces both the network-wide average latency and the 95th percentile tail latency. Furthermore, it achieves the highest success rate for high-priority tasks under heavy-load conditions. Ultimately, this architecture effectively overcomes the "herd effect" among local nodes, realizing superior global load balancing and absolute QoS guarantees for critical tasks within dynamic satellite networks.
Volumes View all volumes
2026
Volume 17June 2026
Find articlesVolume 17April 2026
Find articlesVolume 17February 2026
Find articles2025
Volume 16December 2025
Find articlesVolume 16November 2025
Find articlesVolume 16April 2025
Find articlesAnnouncements View all announcements
Advances in Engineering Innovation
We pledge to our journal community:
We're committed: we put diversity and inclusion at the heart of our activities...
Advances in Engineering Innovation
The statements, opinions and data contained in the journal Advances in Engineering Innovation (AEI) are solely those of the individual authors and contributors...
Indexing
The published articles will be submitted to following databases below:
